안녕하세요 헬셀입니다.
오늘은 선풍적인 인기를 끌고 있는 멀티콥터 NAZA F450과 저렴하지만 모든 기능이 들어있고 성능이 뛰어난 최신 2.4Ghz 7채널 조종기 DEVO7과의 셋팅법을 설명해 드리고자 합니다.
다른 조종기 사용 시에도 참고하시면 도움이 될 듯 합니다. 항상 메뉴 설정 마지막 단계에서는 ENT를 눌러서 저장해 주세요.

우선 데보7조종기를 수신기와 바인딩하고 MODEL 메뉴로 이동 NAME을 변경해 줍니다.
가장 하단의 FIXID메뉴로 이동하여 OFF 상태를 ON 상태로 전환하여 CODE 를 FIX해 줍니다.
( Fixing 작업의 목적은 No control 발생한 후 재 바인딩 시 빠른 연결을 목적으로 합니다.
바인딩이 끝났다면 윗쪽 메뉴 중 TYPE으로 이동하여 AERO 를 선택하여 주고 ENT를 눌러줍니다.. ( 멀티콥터는 대부분 비행기 모드를 사용 )
주요한 기능 중 하나인 Fail Safe 기능을 활성화 함으로써 자동 착륙모드를 활성화 할 수 있는데..
FUNCTION 메뉴로 이동하여 SAFE를 선택하고 ELE, AIL, THRO, RUDD의 HOLD 상태를 SAFE로 변경하고 적정한 %를 입력해 주고 ENT를 눌러 줍니다.
또한 비행시간 확인에 용이한 타이머 설정을 할 수 있는데..
FUNCTION메뉴에서 TIMER를 선택하고 R,L버튼을 이용 COUNT를 상태로 전환하고 DN, UP 버튼을 이용하여 시간을 설정하고 R,L 버튼을 이용 시긴을 설정해 주고 ENT를 눌러줍니다.
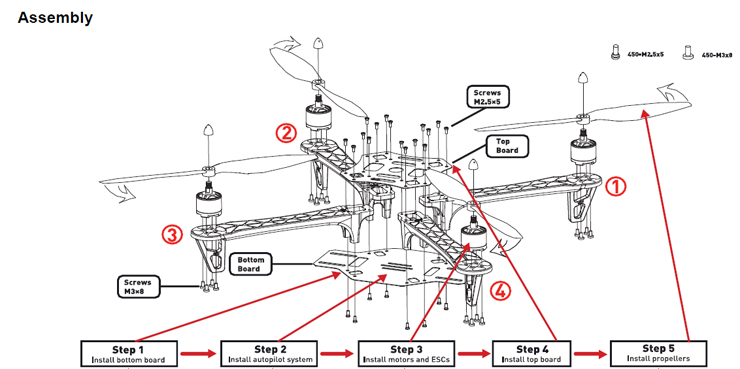
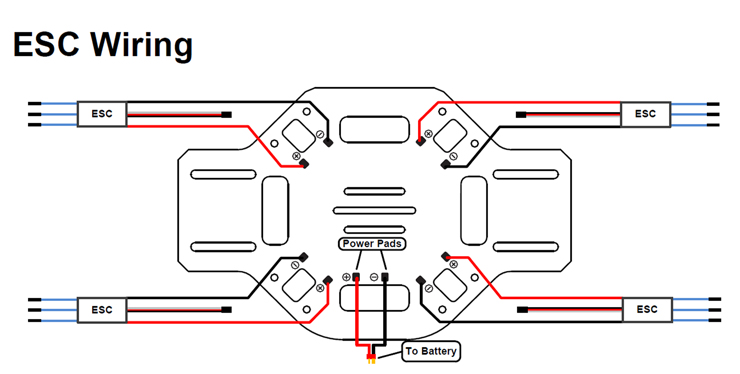
기체 조립하고 상기의 조종기 셋팅을 완료하고 기체 전원을 연결하면 띠. 띠. 띠, 띠......하며 빠른 경고음이 들리는데 이것은 조종기 스틱 칼리브레이션이 되어 있지 않았다는 신호음으로 기체에 부착된 VU와 컴퓨터를 연결하고 전용프로그램을 구동하여 셋팅하면 소리가 멈추게 됩니다.
<참고그림>
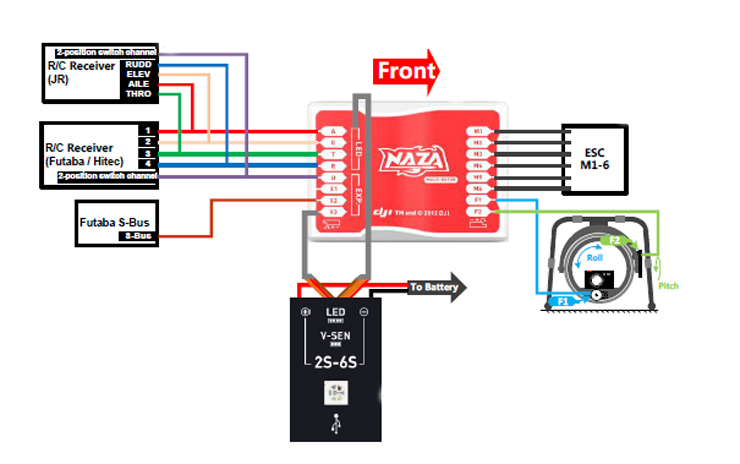
< 데보 수신기는 JR 방식으로 선을 연결하여 주시면 됩니다. 참고로 T는 Throttle , R은 Rudder , E는 Elivator, A는 Ailion을 의미합니다 >
전용프로그램 사용법을 간략히 설명드리겠습니다.
우선 상품페이지 하단에 위치한 상품사용후기 게시판에 있는 소프트웨어를 다운로드 받습니다.
1. 컴퓨터 구동 시스템에 따라 32bit 또는 64bit 드라이버를 설치해 줍니다.
2. VU와 PC를 USB케이블로 연결하고 기체에 전원을 넣어 줍니다.
3. 만약 시스템에서 드라이버를 자동 설치하고자 한다면 중지시켜 주세요.
4. DJI_NAZA_M_Driver_32bit 또는 64bit를 더블 클릭하고 드라이버를 셋업 해 줍니다.
5. NAZASetup 프로그램 폴더를 클릭하고 Setup.exe를 눌러 프로그램을 설치해 줍니다.
프로그램을 구동하면 사용자 이메일주소와 패스워드를 입력해 달라고 하는데 이는 제조사에 제품을 등록하는 과정으로 입력을 완료하고 엔터하면 입력한 메일주소로 프로그램 활성화 메시지가 전달됩니다. 메시지를 확인하면 프로그램 사용이 가능해 집니다.
프로그램을 오픈하면 좌측에 5개의 메뉴를 확인 할 수 있는데... 차근차근 사용법 설명해 드리겠습니다.
Motor Mixer
직관적으로 각각믹서타입을 클릭하면 우측창에 기체 조합 형태가 표기되는데 원하시는 모양의 기체를 선택해 주면 됩니다.
F450의 경우 Quad-Rotor I 방식의 플러스 타입과 Quad-Rotor X방식의 엑스타입 둘 중 하나를 선택해 주면 됩니다.
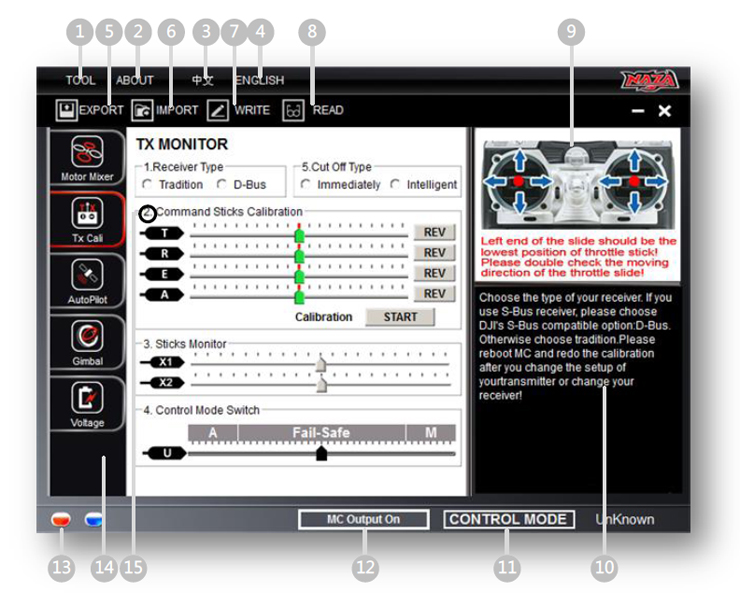
TX Cali
조종기 스틱의 움직임 방향과 범위값을 지정해주고 카메라 짐버 셋팅 및 컨트롤 모드 스위치 설정을 해주는 메뉴입니다.
1. 리시버타입은 일반적인 방식은 Tradition을 선택해 주시면 되고 D-Bus방식의 수신기를 사용하고 있다면 D-Bus를 선택해 주시면됩니다.
2. 조종기 스틱 칼리브레이션
T는 Throttle , R은 Rudder , E는 Elivator, A는 Ailion을 의미하며 우측 REV는 스틱의 움직이는 설정해 줍니다.
조종기와 연결이 잘 되어 있는 상태라면 T,R,E,A의 중앙 초록색 화살표가 스틱을 움직일 때마다 움직이는데.. 메뉴의 우측하단에 있는 START버튼을 눌러주고 스틱을 최대 값으로 전후좌우 이동하여 주고 초록색 화살표가 중앙에 정렬하는지 확인 합니다. 칼리브레이션이 완료되면 FINISH를 눌러서 설정을 완료합니다. 조종기 스틱을 전후 좌우로 움직이며 초록색 화살표가 정상적인 방향으로 움직이는지 확인하고 만약 반대 움직임을 보여 준다면 REV버튼을 NORM으로 전환시켜줍니다.
3.Sticks Monitor
이 메뉴는 카메라 짐버를 장착했을 때 설정하는 것으로 이번 설명에서는 언급하지 않겠습니다.
4. Control Mode Switch
Naza Controller와 수신기 연결 시 채널 한개를 할당하여 Atti,Mode와 Manual Mode를 선택적으로 사용할 수 있습니다.
Naza Controller의 U Port를 수신기에 할당된 한개 채널에 연결해 줍니다. ( 조종기 채널 선택은 2단 토글키를 사용 할 수 있는 채널이면 됩니다. ) 할당된 토글키를 on/off하면 중앙 화살표가 좌, 우로 움직이는데.. 만약 화살표가 A, M 범위값 이상으로 벗어나면 명령 수행이 되지를 않습니다. 범위값의 조절은 조종기의 채널 EPA 변경을 통하여 변경할 수 있습니다.
예를 들어 GEAR채널에 U포트를 연결 했다면 GEAR채널 EPA값을 상하 변경( + 100% => 90%=>80%....-100%, -90%, -80%..) 해 주면 화살표가 A,와 M 각각의 중앙에 위치하게 됩니다. 토글키를 움직여 화살표가 정상적으로 A,M에 위치하면 설정 완료된 것입니다. 설정이 올바르다면 화살표가 각각 모드에 위치시 각 영역의 색이 초록으로 변화합니다.
Fail Safe는 조종기 상에서 Fail Safe기능을 활성화 했을 때 작동하며 작동 확인은 기체는 전원을 연결하고 조종기 전원을 끄면 화살표가 Fail Safe 중앙으로 움직여 주면 정상 작동 하는 것입니다 ( 주의 : 안전을 위하여 프로탤러는 반드시 제거하고 테스트에 임해 주세요 )
5. Cut Off Type
모터의 구동 멈춤을 설정해 줍니다.
NAZA의 구동은 다른 RC제품과 특이하게 양쪽 스틱을 동시에 하단으로 움직여 줄 때 구동이 가능합니다. ( 예를 들어 좌우측 스킥을 동시에 좌하단으로 위치...또는 우측키는 좌하, 좌측키는 우하로 이동 시...)
모터를 STOP할 때도 동일한 방식으로 키를 조작해야 정상 작동하게되는데
Immediately 선택 시 스로틀 스틱이 최하단 기준 10% 이하에 위치 시 자동으로 모터의 구동을 정지합니다.
Inteligent 선택 시 두가지 모드에서 다른 반응을 보이게 되는데.. Manual Mode에서는 양쪽스틱을 동시에 움직여 줄 때 멈추게 되면 Atti.Mode에서는 10% 이하에 위치 시 자동으로 모터의 구동을 정지합니다.
AutoPilot
기체의 비행 상태를 최적화시켜줍니다.
기본값은 100%에서 시작하는데 기체의 상태에 따라 값의 변화를 주어 가장 안정적인 상태값을 찾아 저장시켜줍니다.
셋팅요령은 우선 Basic Gain의 Pitch와 Roll을 맞추고 Yaw, Vetical 맞추어주고... 다음으로 Attitude Gain을 맞추어 주는 순서로 설정해 주면 됩니다. 값변화는 1회당 10~15% 이내로 하고 비행 후 다시 재 설정하는 방식으로 진행하여 주세요.
Pitch와 Roll은 정지 비행 시 기체의 전후좌우 떨림을 잡아주는 역활을 하는데.. 너무 과도한 값은 기체의 떨림을 유발시키며 너무 작은 값은 기체가 흐느적거리게 됩니다. Yaw값은 헬기의 테일 제어와 동일하게 적용되는 것으로 과도한 게인값은 헌팅을 유발합니다. 적절한 값 설정으로 통하여 사용자 입맛에 맞는 회전력을 설정하세요.
Vertical은 값의 변경을 통하여 고도 유지가 잘되는지 확인해 보세요. Atti.Mode에서 스로틀 스틱이 중앙에 위치 시 Vertical gain값이 적정하다면 동일한 높이를 잘 유지 할 것입니다. 적정한 값을 찾기 위해서는 10% 가량씩 값을 상향 조절하여 스로틀 스틱을 움직였을 때 너무 민감하게 반응한다면 값을 20% 가량 감소시켜주시고 재 테스트 해주세요.
Attitide gain값은 스로틀 스틱을 움직였을 때 민감하게 혹은 둔감하게 반응 할 수 있도록 설정해 줍니다. 너무 값이 높으면 수평을 잡는 과정에서 기체 요동이 있을 수 있으며 너무 낮으면 기체가 즉시 멈추지 않고 밀리며 천천히 멈추게 됩니다.
Gimabl
짐저 제어는 다음에 설명토록 하겠습니다.
Voltage
배터리 저전압으로 인한 예기치 않은 추락을 방지하고자 2단계의 저전압 경고 시스템을 구동시켜줍니다.
VU와 MU ( V-SEN과 X3)연결이 확실한지 확인해 주세요.
저전압 경고 시스템이 정상 작동하면 VU상의 LED가 빨간색으로 점멸합니다.
2단계 저전압 경고 시스템은 Manual Mode에서만 작동합니다. 자동모드에서는 작동하지 않습니다.
전원 공급 후 칼리브레이션 버튼을 누르면 자동적으로 프로텍션 값이 설정됩니다.
No Load값과 Loss값은 사용자가 적절히 설정할 수 있습니다.
2단계 프로텍션 모드가 활성화되면 기체가 그자리에서 하강하여 자동 착륙합니다.